Russian cosmonauts to control land robot from ISS in preparation for Moon mission
Published 6 Aug, 2015 20:10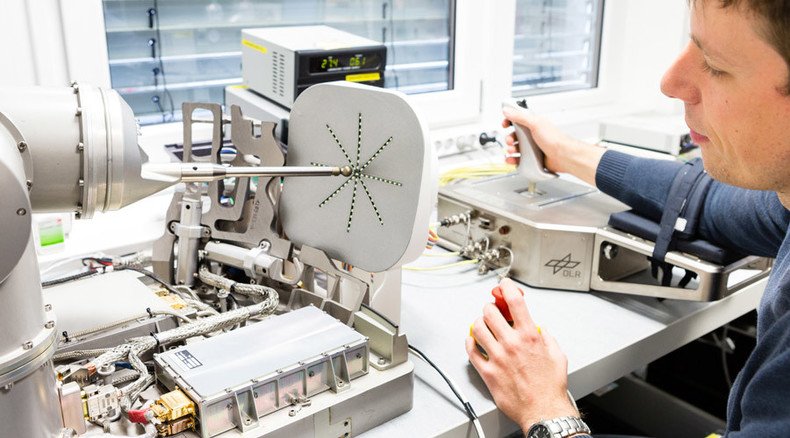
Three-time cosmonaut Oleg Kononenko will manipulate robots in Munich and St. Petersburg with the help of a joystick from the ISS, a dry run for the proposed construction of a Russian lunar base, which will have to be coordinated partly from space.
“A man can work on the surface of the moon for several hours, but completing a base will take months, so robots are the future,” explained Vladimir Zaborovskiy, who heads the Kontur project at the St. Petersburg Scientific Centre for Robotics and Technical Cybernetics, which has been developing the remote control system in tandem with German Aerospace Center, known as DLR.
READ MORE: Soyuz takes manned space mission to ISS, 1st time since Progress, SpaceX failures
Running since 2009, the first stage of the Kontur project saw engineers operating robots on the International Space Center from Earth. In the second stage, Kontur-2, a control suite was taken up to the ISS on July 23, with Expedition 44, and now the roles will be reversed.
During 20 sessions Kononenko, who first travelled to the ISS in 2008, will control two robots, a hyper manipulator – a giant robotic limb, resembling a snake – in St. Petersburg, and another in a DLR facility in Munich, which will have to be moved along a precise route, without going out of bounds.
To achieve greater accuracy in his movements, Kononenko will be using a force/torque sensing system – a controller that replicates the impacts the robot feels, making its manipulator feel like he is inside the robot hand.
“This is the first time we will be controlling robots from space using this technology. We will immerse the cosmonaut, moving through space at a giant speed, in the world of a robot located thousands of kilometers away,” explained Zaborovskiy to TASS news agency.
The task will be complicated by the zero gravity environment, and a delay in the signal of several seconds as it is sent to Earth. To cope, Kononenko will be strapped into his controls, and the speed of the joystick will increase and decrease automatically, depending on the lag of the signal received. He will also have access to a video monitor, connected to a camera mounted on the robot, and a 3D model that will record its movements.

The first session is planned for later this month, with several more in October and November.
READ MORE: Space duo: Russia invites China to create joint lunar station
Zaborskiy believes that the new generation of robots, will “make or break” the future of space exploration, including the construction of the moon base, which Russia is planning to start by the end of the next decade, possibly in conjunction with China. While some of the construction could be directed from Earth, it would be more efficient to do other tasks from a craft that will orbit the Moon, and have access to its dark side.
For the next phase of the project, Kontur-3, scientists plan to land a group of rovers on a planetary surface, and drive them from the space station.
Similar experiments are being conducted by other space agencies. NASA astronaut Sunita Williams controlled a rudimentary LEGO robot in Germany from the ISS in 2012, and the following year Italian astronaut Luca Parmitano deployed an antenna with the K10 rover in the courtyard of the NASA Ames Research Center in California.