
Harvard ‘brainiacs’ are at it again. Inspired by termites, they have realized their dream of cheap, expendable, self-organizing robots – a construction crew building complex structures at a quick pace, and completely independent of leadership.
The possibilities are vast. The machines can be made to build any three-dimensional structure on their own and with minimal instruction. But what is truly staggering is their ability to adapt to their work environment and to each other; to calculate losses, reorganize efforts and make adjustments. It is already clear that the development will do wonders for humanity in space, hard-to-reach places and other difficult situations.
Looking at huge mounds of soil and the resilience of hordes of termites building them, working for a common cause, while their comrades die, the techies and engineers at the Harvard School of Engineering and Applied Sciences (SEAS) and the Wyss Institute for Biologically Inspired Engineering at Harvard University have created an army of little bots that do just that. And they cooperate and learn with no oversight.
The challenge was – how can one predict “high-level outcomes given low-level rules?” Small, insignificant parts need expert coordination to achieve a seemingly insurmountable task. But the scientists on the project wanted to go a step further and find out exactly what kind of “low-level rules” need to be met to control high-level results. Now, they believe they’ve created a user-specific structure, in which “the system automatically generates low-level rules for independent climbing robots that guarantee production of that structure. Robots use only local sensing and coordinate their activity via the shared environment.”

Put simply, we will soon be able to harness the power of tiny machines, making up their own coordination framework to achieve complex tasks. All we need to do is give them the green light and input an algorithm.
This is the culmination of a four-year project, the results of which were published in the journal Science and presented this week at the AAAS 2014 Annual Meeting.
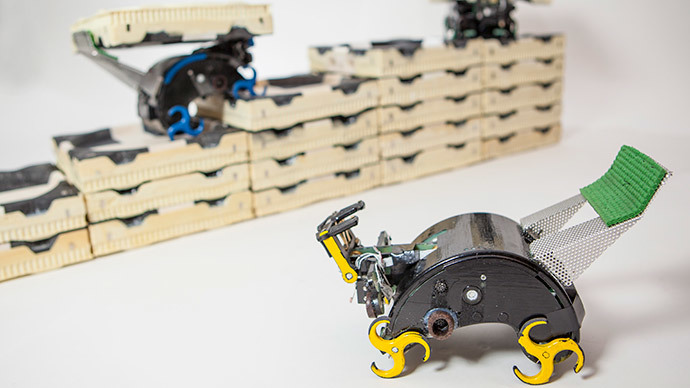
The initiative is called TERMES, and the little bots are already capable of handling complex construction three-dimensional construction projects, from houses to castles, while seamlessly re-organizing in instances when a part of the collective organism malfunctions. This is an exciting breakthrough for scientists for several key reasons: it is cheap, expendable, requires no oversight and, as a result, can be used in environments and tasks hostile to humans, like building or digging on distant planets or helping in humanitarian relief efforts, such as natural disasters.
In the video below, robots that are entirely 3D-printed, complete with all-terrain wheels, use a pre-set algorithm to generate their own rules and distribute tasks amongst each other while completing an assignment.

"The key inspiration we took from termites is the idea that you can do something really complicated as a group, without a supervisor, and secondly that you can do it without everybody discussing explicitly what's going on, but just by modifying the environment," Harvard SEAS Professor of Computer Science on the project and co-leader of the Bioinspired Robotics platform, Radhika Nagpal wrote.
When we think of human construction and robots, there is one crucial distinction, the scientists believe: the construction crew can’t move an inch without a constant stream of tasks being coordinated at the top. However, "in insect colonies, it's not as if the queen is giving them all individual instructions. Each termite doesn't know what the others are doing or what the current overall state of the mound is," another scientist working on the project, Justin Werfel, explained.
To get the robots to do their thing, Werfel gives his robots a mathematical model of a structure to be built, but from that point on they set their own rules and make their own individual calculations, while accounting for hiccups and inconsistencies in real-time. The robots’ guts are comprised of ultrasound and infrared sensors, together with an accelerometer, which allows them to measure distances and locate themselves on a grid in relation to others and to the structure.
One may ask, “Why termites?” The simple logic behind the analogy rests on the little creatures’ ability for 'stigmergy' – a method of communication based on observing each other’s movements and changes in relation to each other and the whole. That is why the TERMES project research is touted as living proof of how ever more complex, distributed and scalable artificial intelligence systems are possible.
Nagpal’s work with the Self-Organizing Research Group is involved in making the algorithms that tell any number of robots to act as a single unit. And apart from engineers and robotics specialists, the team also includes biologists. And what is really fascinating about the project is the desire to replicate natural situations which still have not found an explanation in real-life, namely – what exactly accounts for changes in group behavior as opposed to individual one. For that reason, Nagpal still predict that the end result involving huge armies of machines performing complex tasks, will, after all, rely on a mix “between the centralized and the decentralized system” to improve group efficiency.