Self-flying drone learns to avoid obstacles, reaches record speed (VIDEO)
Published 3 Nov, 2015 18:28 | Updated 3 Nov, 2015 18:29
A researcher at MIT has released a video of an autonomous drone equipped with an advanced obstacle-detection system that can map its surroundings to successfully evade hindrances, traveling at speeds previously unreached by a self-flying UAV.
Andrew Barry, a PhD student at MIT's Computer Science and Artificial Intelligence (CSAIL) lab, has created a drone that can detect obstacles up to 10 meters (32 feet) away at a rate about 20 times faster than current software allows, according to an MIT press release.
New video shows Barry's drone zipping around trees at speeds up to 30 miles per hour (48 km/h).
Tradition algorithms capture images at multiple distances to watch for obstacles, meaning the amount of processing power needed will only allow a drone to fly about 6 miles per hour, at most. Barry, however, set his drone to detect only what is 10 meters away.
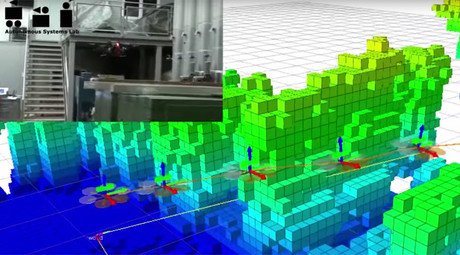
“You don’t have to know about anything that’s closer or further than that,” Barry said. “As you fly, you push that 10-meter horizon forward, and, as long as your first 10 meters are clear, you can build a full map of the world around you.”
READ MORE: Droning on forever? Boeing patents UAV that could fly indefinitely, recharge in mid-air
The drone's camera can scan its surrounding area at 120 frames per second, reading depth per frame in about 8.3 milliseconds.
“Everyone is building drones these days, but nobody knows how to get them to stop running into things,” Barry said. “Sensors like lidar are too heavy to put on small aircraft, and creating maps of the environment in advance isn’t practical. If we want drones that can fly quickly and navigate in the real world, we need better, faster algorithms.”
Barry's drone weighs just over a pound and has a wingspan of 34 inches. It was built using off-the-shelf components costing around $1,700, not advanced radar systems employed by companies with deep pockets, such as Walmart, Amazon, and Google, that currently seek to develop autonomous drones for commercial purposes.
He said he hopes to advance his algorithm to allow a drone to pass through a dense forest with ease.
“Our current approach results in occasional incorrect estimates known as ‘drift',” he said. “As hardware advances allow for more complex computation, we will be able to search at multiple depths and therefore check and correct our estimates. This lets us make our algorithms more aggressive, even in environments with larger numbers of obstacles.”
Barry's software is open-source and available online.