Catbot: Swiss ‘cheetah-cub’ robot gets feline biomechanics
Published 17 Jun, 2013 23:10 | Updated 17 Jun, 2013 23:10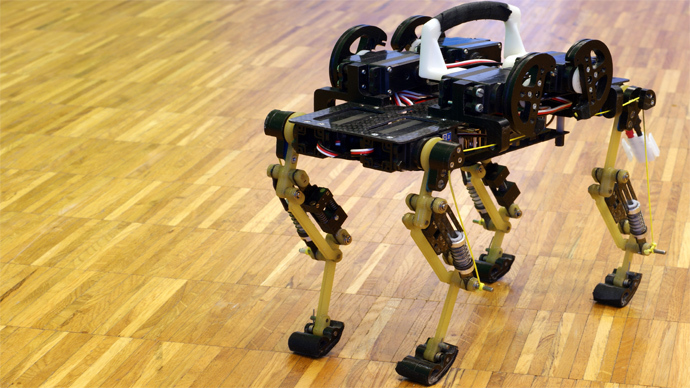
Swiss scientists are challenging nature, constructing a ‘cheetah-cub’ robot that imitates a cat’s movements. Though it still lacks a head for guidance and its electricity-supplying tail is way too long, it could be used for exploration and rescue.
The quadruped robot with finely mimicked feline morphology was designed at the Biorobotics Laboratory (Biorob) at Ecole Polytechnique Fédérale de Lausanne (EPFL), which published the results of tests in International Journal of Robotics Research.
The ‘cheetah-cub’ robot is moved by a Central Pattern
Generator (CPG) that produces trot-gait locomotion patterns that
move pantograph-like, three-segmented legs that thoroughly
reproduce the mechanics of a feline leg.
“This morphology gives the robot the mechanical properties from which cats benefit, that's to say a marked running ability and elasticity in the right spots, to ensure stability,” explains Alexander Sprowitz, a Biorob scientist. "The robot is thus naturally more autonomous.”
The robot is light, compact and robust enough to carry a GoPro camera, it is reportedly assembled from cheap materials.
Though the project is still in early stages, ‘cheetah-cub’ already trots quite fast and fears no minor obstacles. It runs at a speed of 1.42 m/s, the average speed of a walking man or nearly 7 lengths of its own body per second.
“Studying and using the principles of the animal kingdom to develop new solutions for use in robots is the essence of our research,” shared an expert in artificial intelligence and Biorob Director Auke Ijspeert.
Biomechanics attracts robotic researches as a source of ready-to-use ideas on how to make an object move ‘naturally’ on rough terrain. But to do so the scientists go deep inside the mechanics of the process, trying to understand how a skeleton interacts with muscles and tendons. Animals also usually have excellent auto-stabilization characteristics, something that man-made robots usually lack.
The Biorobotics Laboratory has conducted research into animal locomotion before, having constructed operable models of a salamander robot and a lamprey robot.
The ‘cheetah-cub’ robot “is still in the experimental stages, but the long-term goal of the cheetah-cub robot is to be able to develop fast, agile, ground-hugging machines for use in exploration, for example in search and rescue in natural disaster situations. Studying and using the principles of the animal kingdom to develop new solutions for use in robots is the essence of our research,” shared Auke Ijspeert.
EPFL’s Biorob is certainly not the only laboratory that designs
animal-like robots. The pioneer in this field is Boston Dynamics'
quadruped walking machine program ‘Big Dog’, presented in 2008.
By 2011 the program developed into four-legged robot nicknamed the LS3 (AlphaDog) developed for the US Defense Advanced Research Projects Agency (DARPA) that they expect to send into battle to assist soldiers and Marines in an array of conditions.
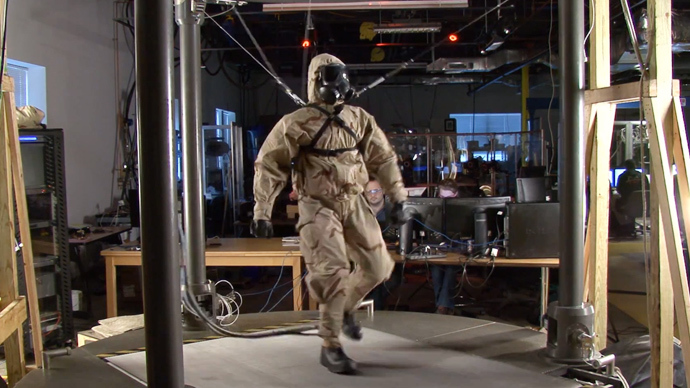
0In April 2013 DARPA released video footage of a PETMAN bipedal robot that looks and moves alarmingly like a space-age robot warrior.
A coincidence about feline robots is that Boston Dynamics has also developed a quadruped robot called ‘cheetah’ with funding from DARPA. And this one is really fast. Boston Dynamics’ cheetah has already reached a top speed of 45 km/h, and while it still far from real cheetah’s max 120 km/h thrust, the ‘cheetah-cub’ robot can easily outrun a man once it gets onboard batteries, because as of now it receives electricity and commands via a ‘tail’ of wires.