NASA’s twitchy bouncy roboball may explore Titan one day (VIDEO)
Published 28 Dec, 2013 13:07 | Updated 28 Dec, 2013 22:55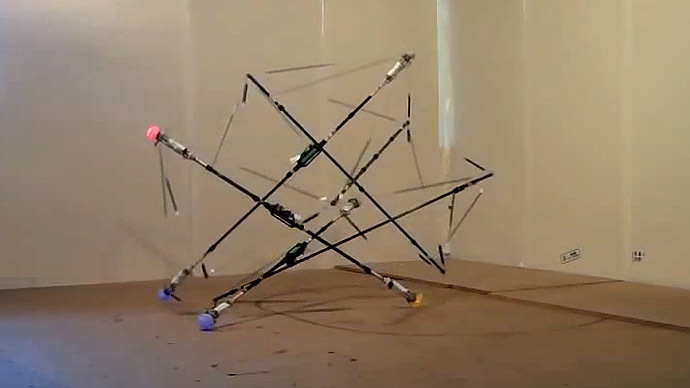
A tangle of poles and ropes that looks like an evilly twitching tent may be the precursor of a future robotic explorer, which would be dropped from a height of 100 km onto Saturn’s moon, Titan, without a parachute.
The construction of the Super Ball Bot is an attempt to create rigid and flexible parts forming a lightweight shock-absorbing robotically controlled exoskeleton. Hopefully, it will allow the explorer to withstand the fall to Titan, and will also be used for locomotion on the surface.
The project is being developed by Vytas SunSpiral and Adrian Agogino at the NASA Ames Research Center, who have shown their progress so far to IEEE Spectrum magazine.
The idea relies on the concept of tensegrity, which is a portmanteau word for “tensional integrity”, a notion that originally found applications in architecture. The same principle works in biology, with muscles, bones and tendons working in unison.
"With a tensegrity structure, the entire structure shares the burden of reducing that stress, which is what you see in human bodies," said SunSpiral.
The potential advantages of their approach are many. A tensegrity-based robot would be able to fold down very small, which is always a benefit for cramped space missions. It won’t need a separate landing system with parachutes, retrorockets and airbags, especially if the target is Titan, where the dense nitrogen atmosphere will help to break the fall.
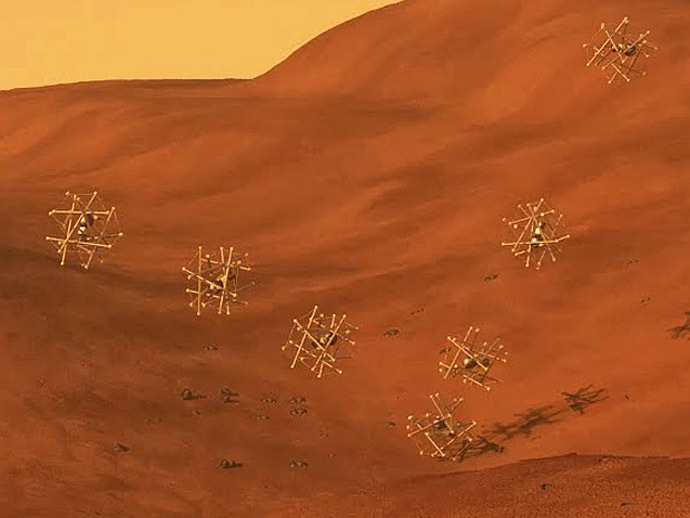
It will also fare better on the surface, compared to traditional wheeled rovers, since it could easily survive a fall from a cliff and traverse sandy terrain. In addition to this, the low mass and relative low cost of tensegrity structures mean payloads may include numerous individual robots, potentially even hundreds of small ones, each with its own scientific payload.
However, the technology has a major drawback. Rovers like the Curiosity are basically controlled from Earth, one component at a time. For the Super Ball Bot, with its many nonlinearly interconnected parts that affect each other in often unpredictable ways, this would not be an option.
So SunSpiral and Agogino are working on a solution that would allow the bot to operate automatically, leaving mission control the job of just setting objectives. The team is looking at biologically-inspired control mechanisms that use oscillatory signals, similar to the central pattern generators (CPGs) used in multi-limbed robots.
Most of the work is centered on a computer-simulated environment, in which the team tries to identify the best approach for coordinating the robot’s movements. They have also built 1 meter diameter hardwire prototypes to test controls, and assess how good such a structure would be at protecting a fragile payload during a fall.
Compared to their computerized counterparts, the real-life bots are currently quite twitchy. But the engineers, who won a Phase II award from the NASA Innovative Advanced Concepts this year, hope that one day tumbleweed-like robotic explorers will drop on Titan.